Priyanka P
I am pleased to introduce Journal of Electrical and Electronic Systems (JEES) (https://www.hilarispublisher.com/electrical-electronicsystems.html) a rapid peer reviewed Journal which has key concerns over the Applications of Electrical and Electronic Systems by exploring the vacuum tubes, transistors, diodes and integrated circuits, and associated passive interconnection technologies. I am pleased to announce that, all issues of volume 8 were published online well within the time and the print issues were also brought out and dispatched within 30 days of publishing the issue online during the year of 2019.
The Journals aims to flourish and to maintain the standards in research and practice, provide platform and opportunity to present evidence based Electrical and Electronic Systems assessment of research and probably it is much in deed for students, teachers and professors.
All published articles of this journal are included in the indexing and abstracting coverage of Index Copernicus, Open J Gate, Sherpa Romeo, RefSeek, Hamdard University, Hamdard University, EBSCO A-Z, OCLC- WorldCat, Publons.
During the year 2019, Journal of Electrical and Electronic Systems received a total of 38 papers, out of which 11 articles were rejected in the preliminary screening due to plagiarism or being out of the format and peer review process. During 2019 around 17 articles were subjected for publication after they are accepted in the peer review process.
In the 3 issues of Volume 8 published during the year 2019, a total of 17 articles were published (at an average of 5 articles per issue) of which, articles were published from authors all around the world. A total of 30 research scientists from all over the world reviewed the 17 articles published in volume 8. Average publication period of an article was further reduced to 14-21 days.
Journal of Electrical and Electronic Systems also announces its new association with HILARIS Publishers for Archiving, Journal maintenance, financial purpose and support. However the journal will be running its original website
https://www.hilarispublisher.com/electrical-electronic-systems.html parallel for Editorial and review work process so as to maintain its highest standard of scientific work.
During the year 2019, a total of three Editors, five Reviewers joined the board of JEES and contributed their valuable services towards contribution as well as publication of articles, and their valuable reviewer comments will beneficial to publish quality of article in the Journal.
I would like to take the opportunity to express my gratitude to all the editorial board members, authors, reviewers, the publisher, and the advisory of JEES, the office bearers for their support in bringing out yet another volume of JEES and look forward to their unrelenting support to bring out the Volume 9 of JEES in scheduled time.
I take this opportunity to acknowledge the contribution of Editor-inchief and Associate Editor during the final editing of articles published and bringing out issues of JEES in time. I would also like to express my gratitude to all the authors, reviewers, the publisher, language editor, honorary editors, the scientific advisory and the editorial board of JEES, the office bearers for their support in bringing out the new volume (Volume 9) of JEES for the calendar year 2020 and look forward to their unrelenting support further to release more issues for International Journal of Anatomical Variations JEES in scheduled time.
Gerassimos Peteinatos
The irruption of Information and Communication Technologies in agriculture has provided new tools, enabling the more regular and rational distribution of efforts and inputs. This leaded into the current farm management systems and crop management strategies that take into account the temporal and spatial variability of the crop. This irruption of new digital technologies, known as Agriculture 4.0 incorporated within Precision Agriculture, can revolutionize agriculture and herald the dawn of a more autonomous and stable agricultural world. A pallet of different applications can utilize this novel technology, for example in plant breeding, nutritional assistance or pest management. A pest monitoring system and the equivalent localized treatment applicator can be conceived as a complex artificial system consisting of (1) perception (sensors) for detection and 3D modeling of natural structures, focusing on values of importance and interest. (2) Decision making (processing) for the elaboration of an action plan that monetizes the parameters of interest extracted from the models into treatment decisions, always taking into consideration the perceived and established objectives. (3) Actuation (actuators): implementation of the treatment plan, closing the perceptiondecision - actuation loop through the control and development of intelligent tools. The integration of perception systems for the detection and control of action devices for treatment on autonomous mobile platforms will allow a more exhaustive, and therefore effective, pest treatment, as well as being more precise and safe both for the agri-food chain and the environment. This general approach is the basis for agricultural robotics.
There have been major developments in the world related to food safety and traceability. Some of the initiatives come from governments to protect the health of the citizens, the other are private initiatives by growers and retailers in order to meet the expectations of their customers with respect to food safety and environmental sustainability. Everyone in the food chain assumes that these expectations can be satisfied if production is done in line with good agricultural practices (GAP). It appears also that the origin and destination of animal feed, materials and food in all stages of production and distribution must be known and as information available to the qualified authorities or to food safety departments at manufacturers or retailers. Global G.A.P. is an example of a standard for primary agricultural production. A partnership between retailers, food traders and growers administers and maintains this standard that is being used worldwide. The aim is to ensure integrity, transparency and harmonization of global agricultural standards since sourcing of food, either fresh produce or processed farm products, has become a global activity. Precision agriculture
technologies and robotics share the underlying ideas of GAP and may become important tools for complying with the regulations and for documentation of the production conditions as a proof of compliance.
The Scheme covers the whole agricultural production process of the certified product, from before the plant is in the ground (seed and nursery control points) to non-processed end products (Produce Handling control points). In response to the challenges posed by fast changing crop protection product legislation, the Global G.A.P. organization developed guidance notes to help farmers and growers to become more fully aware of the maximum residue limits (MRLs) in operation in the markets where the product will be sold.
Precision Farming and the use of Global Positioning Systems (GPS) on agricultural machinery, provide location and time information of all treatments. This is of course very important for automation like navigation during the different treatments or the collection of data on crop status, diseases and yields. After harvest, the GPS data may be added to the shipping documents such that the origin of the product ( the region, the farmer, the field) can be traced and the consumer can be assured about the origin claims. It is also possible in mixed final products to state where the different component of such a mixture originated. For retailers or stores that claim to sell locally produced food and for their clients, it offers the possibility to trace the product and verify the claims as long as the system is fool proof.
Good agricultural practice implies that the correct dose of fertilizer is applied at the correct moment and in the correct way. The correct dose depends on the soil condition or the crop condition. Numerous efforts have been done for automation of the measurement of nutrient availability in the soils. They include automation of soil sampling for laboratory chemical analysis. The time delay for getting the results can be reduced by using near field chemical analysis using optical VIS/NIR techniques or electrochemical sensors on prepared samples or even on. The latter can be direct measurement ion-selective field effect transistors (ISFETs) with flow injection analysis or the measurement of ion activity using ion-selective electrodes. At this moment they are only for pH reliable. Although the electrochemical measurements can be geo-referenced, the time lag between sample collection and sensor output precludes onthe-go control of variable rate lime and fertilizer applications.
Arun Sahayadhas
Driver hypovigilance which incorporates drowsiness, inattention and fatigue are the major cause for street injuries. To come across the driver hypovigilance, the physiological indicators wishes to be amassed and analyzed. In case of hypovigilance, the driving force needs to be alerted on time so that loss may be avoided. The physiological indicators are the graphical representation of human bodily circumstance. Electrocardiogram (ECG), Electrooculogram (EOG) and Electromyogram (EMG) are some of the signals which are used here to offer the state of motive force’s unusual behaviour. Ten topics participated within the records series experiment and have been asked to force for two hours at 3 one-of-a-kind timings of the day (00:00 – 02:00 hrs, 03:00 – 05:00 hrs and 14:00 – 16:00 hrs) when their circadian rhythm was low. The five lessons specifically – normal, visual inattention, cognitive inattention, fatigue and drowsy have been analyzed. The Butterworth 6th order filter out is applied to do away with the noise from the signals. The capabilities which are extracted from the indicators may be linear and non-linear. Sixteen Linear features consisting of suggest, median, minimal, maximum, well-known deviation, strength, skewness, kurtosis, Energy, correlation coefficient, imperative frequency, top frequency, first quartile frequency, third quartile frequency, Interquartile Range and Root Mean Square have been extracted. Likewise, 8 Non-linear functions which include Spatial filling index (SFI), Central tendency degree (CTM), Correlation size, Approximate Entropy (ApEn), HURST exponent, Largest Lyapunov exponent, Nonlinear Predication error (NLPE) and stoppage standards were extracted. These extracted functions were given as enter to the exclusive classifiers (Support Vector Machine (SVM), K-Nearest Neighbor (KNN), Convolutional Neural Networks (CNN)) to acquire the accuracy, sensitivity and scalability. The outcomes display that the features from ECG can be embedded in a clever watch that could alert the motive force all through hypovigilance.
According to the facts released by using the World Health Organization more than 1.2 million humans die each 12 months on the world’s roads, and between 20 and 50 million suffer non-fatal injuries due to road accidents. The National Highway Traffic Safety Administration (NHTSA), USA conservatively anticipated 100000 police reviews on car crashes every year which had been the direct effects of driver drowsiness. Such injuries additionally bring about 1550 deaths, 71000 accidents and $12.Five billion in monetary losses. The National Sleep Foundation (NSF) pronounced that during 2009, 54% of person drivers had pushed a car while feeling drowsy and 28% had in
reality fallen asleep. Driver inattention includes focusing on secondary responsibilities like the usage of cell smartphone, music participant, etc even as driving. In the yr 2008, NHTSA anticipated 5870 deaths, 350,000 injuries and 745,000 assets damages because of driving force distraction (NHTSA’s National Centre for Statistics and Analysis, America, 2009 document). In US alone, damages of $43 billion in step with yr has been anticipated due to mobile smartphone related crashes. A naturalistic driving have a look at determined that seventy eight% of crashes and sixty five% of near-crashes blanketed inattention as a contributing factor. According to the United Nations Economic and Social Commission for Asia and the Pacific (UNESCAP), round 1 million deaths, 23 million injuries and 10 million cars are uncovered to the road injuries of their area each year. They also finish that greater than 85% of the causalities due to road accidents are from the developing nations. All these facts convey that driving force hypovigilance, which incorporates each driver drowsiness and driving force inattention is one of the predominant factors for road accidents at some point of the arena. Most of those accidents can be prevented, if the fatigue or distracted motive force is alerted on time. This calls for a green hypovigilance detection system that can hit upon both drowsiness and inattention to be advanced.
The time period ‘Hypovigilance’ is derived from words ‘Hypo’ & ‘Vigilance’. ‘Hypo’ originates from a Greek word that means ‘faded’ and ‘vigilance’ means ‘alertness’. So, ‘hypovigilance’ collectively way ‘faded alertness,’ and can be described as something that reasons a lower in paying a close and continuous interest. Impairment of alertness in a driving force can be due to extended sleepiness or quick time period inattention. It might also lead the driving force to lose manipulate of the vehicle which in flip can cause accidents like crashing of the car onto different motors or stationary surroundings. In order to prevent those devastating incidents, the kingdom of the driver ought to be constantly monitored.
Driver fatigue is synonymously used with driving force drowsiness. Driver drowsiness mainly depends on the exceptional of the closing sleep, the circadian rhythm (time of day) and the growth in the duration of the driving task. Recent information from countries together with the UK, the US, Israel, Finland, and France suggest that an accelerated quantity of car injuries as a result of driver drowsiness occurred at some stage in the height drowsiness durations sleeping hours of 02:00 to 06:00 hours and 14:00 to 16:00 hours. During those time frames, the circadian rhythm indicates higher risk of getting drowsy and drivers are three instances much more likely to nod off at those times than at 10:00 hours or at 19:00 hours. So researchers have manipulated drowsiness through asking the driver to power for longer duration in humdrum surroundings all through times of day while their circadian rhythm is low. The term inattention and distraction has been used synonymously. According to Hedlund et al. “Distraction includes a diversion of attention from riding, because the driver is briefly focusing on an object, individual, venture, or occasion not associated with using, which in flip reduces the awareness, selection-making, and/or performance of the driver, main to an multiplied hazard of corrective moves, near-crashes, or crashes”. Since distractions may not produce on the spot outcomes, it might be higher if a driver who is distracted is alerted on time. Researchers have specifically treated two types of distraction namely: cognitive distraction and visual distraction.
Eleni Efthimiou
Research on assistive robots has acquired special focus in the area of robotics and is constantly gaining floor, also boosted by using demographic data and associated AAL supportive regulations worldwide. Having in mind devices which want to deal with actual person wishes and be capable of interacting with users in some form of “human” like manner, it has turn out to be obligatory to locate robust methods for augmenting robot intelligence to be able to permit gadgets conquer primary interaction shortages which are easily spotted all through validation through stop user populations.
One main parameter for person attractiveness is tested to be pleasure of the human need for verbal exchange with an “intelligent” partner or assistant, if a tool has to gain user consider and be systematically used inside a specific mid- to long-term time body. In this context, we make the most the paradigm of publicity of assistive gadgets in real use conditions, to discuss the degree of person attractiveness and the need to reinforce robot intelligence within the context of multimodal HRI. Focus is placed on those NLP tools and resources which may additionally boom the span of humanrobot conversation by enticing preferred NLP processes in mixture with alerts of human embodied expression that can result in more suitable performance of robot gadgets while they interact with humans.
The combination of advanced sensing/actuating, verbal exchange, local and disbursed processing, take the original vision for the IoT to a wholly exceptional level, and one which opens completely new lessons of possibilities for IoT and robotics answer carriers, as well as customers of their products. Machine getting to know is a part of a complicated state of intelligence using statistical pattern reputation, parametric/nonparametric algorithms, neural networks, recommender systems, swarm technology etc. To carry out self-sufficient obligations. In addition, the economic IoT is a subset of the IoT, where aspect devices, processing gadgets and networks have interaction with their environments to generate information to enhance techniques. It is in this region wherein self-reliant functions and IoT can realistically allocate IoRT generation. The use of communication-targeted robots the usage of wi-fi communique and connectivity with sensors and different network sources has been a growing and converging fashion in robotics. A connected or “networked robot” 4.1 Internet of Robotic Things Concept 99 is a robotic tool connected to a communications community together with the Internet or LAN. The network may be stressed out or wireless, and primarily based on any of a ramification of protocols together with TCP,
UDP, or 802.Eleven. Many new programs at the moment are being developed ranging from automation to exploration.
The concept of IoRT is going past networked and collaborative/cloud robotics and integrates heterogenous clever gadgets right into an allotted architecture of systems working both within the cloud and at the threshold. IoRT addresses the numerous methods IoT today technologies and robotic “gadgets” convergence to offer advanced robotic competencies, enabling aggregated IoT functionality alongside novel packages, and by extension, new business, and investment opportunities no longer simplest in business domains but in almost each zone where robot assistance and IoT era and packages can be imagined. Actuating based on a holistic method is the characteristics to enable devices “things” to motion over physical and/or virtual sports, a feature or characteristic this is widely recognized in the IoT verticals however that isn't always currently available inside the IoT open marketplace. Actuating desires to look for a relied on, blanketed and secured development, deployment and operation of open multi-vendor IoT applications services. Actuating should be enabled on novel deployments as end result of research efforts allowing “Actuation-as-a-Service” as a brand new paradigm for IoT allowing usability that make sure stop user popularity and engagement for managed IoT devices. Planning is a provided capability to orchestration-organize logic that coordinates the inner platform components for fulfilling provider requests and assuring that agreed nice stages are met at some stage in offerings lifestyles-cycle within the IoT application. The orchestration common sense has to align carrier requests with available resources, information coping with and expertise entities, and their platform-particular representation. Based on good judgment, making plans relies on an automatic workflow engine to instantiate the required functionality on a according to carrier request foundation. The orchestration good judgment will also maintain consumerdescribed representations of information and assets to facilitate the procedure of carrier definition. Robotic things inherit the ability for various and complex sensing and actuation from the lengthy way of life of robotics. From the sensing side, robotic technology and technology presents methods and algorithms to use both simple and complex sensors, consisting of inertial sensors (accelerometer, compass, gyro), ranging sensors (sonar, radar, LIDAR – Light Detection and Ranging), 3-d sensors (3D laser or RGBD digital camera), as nicely more not unusual sensors like cameras, microphones and pressure sensors
Christian Huyck
Cell Assemblies (CAs) are critical to human and mammalian cognition and behavior. A CA is a group of neurons which can keep firing without external stimulation. Our symbolic principles, like dog, are represented by means of CAs. Many non-human mammals do no longer have symbols, but they do have concepts. So, a rat will probably have a time-honored CA for cat, a good way to hearth while a cat is gift. There is a large hole in the educational community’s knowledge of CAs, how they affect motor control, and the way they regulate sensing. Hybrid meeting strains hold up with the economic wishes for superior manufacturing solutions, more desirable product satisfactory, manufacturing flexibility, cost discount and ergonomics development. There are a couple of operations in the guide methods that require extra flexibility and robustness. Despite the reality that commercial robots are utilized in a extensive variety of production strains, there aren't considered mature enough to be in close collaboration with the humans. This keeps up with the reality that the human abilities can't be absolutely changed by way of those of the robots; but, it's far possible for a strategy to be performed by way of combining the abilities of each side. Last but not least, the unconstrained conditions in production lines, together with variable lighting fixtures situations, the crossing people and the independent cell units, which include the automated guided automobiles, are a few essential reasons that initiate the collaboration in complex assembly cells. Theoretically, my CA for stroll to the door is firing after I am walking to the door, but it isn't always clear how that interacts with valuable sample turbines (CPGs), or even if those neurons that execute the CPG are part of the CA. Similarly, it is clear that, for instance, neurons inside the primary visible cortex are concerned when a human view a dog, but it isn't totally clear how they lead to the ignition of the canine CA, or which neurons are inside the dog CA.
There is a Human-Robot Collaboration (HRC) framework proposed, permitting sequential human and robot obligations execution. It belongs to the shared duties and workspace in terms of human–robotic interplay (HRI), when the tasks of human and robot sources are sequential. The proposed technique focuses on the mission allocation between a couple of human and robotic resources that constitute a hybrid meeting cell. A sensible choice-making algorithm is the premise for the duties allocation, thru the assessment of a couple of criteria including imply flow time.
As there's a gap, I, and my collaborators, are trying to fill the gap. I am a laptop scientist, so I am trying to expand packages based totally on CAs. In particular, we assume embodiment is essential, and that operating from simulated neurons is
important. So, we paintings with robots, virtual and physical. We paintings with spiking neurons, typically point fashions. We were growing neural topologies that can be used for virtual agents. We are actually operating as a part of the Human Brain Project, developing topologies that may be reused by means of others to enforce sellers. We have executed a truthful little bit of paintings on developing “higher” function which include neuro-cognitive models of natural language parsing and studying a -preference venture.
An analysis approximately the selection steps in task allocation consists of the assets suitability, availability and processing time. The interplay between a human and a robotic is accomplished thru a depth sensor and the gesture handler software program device. The software implements a undertaking scheduling generation, the human–robotic (HR) duties execution and the interplay among them. The individual elements of the cell are the two robots, the depth sensor and the human. A variety of ROS nodes have been developed aiming to put into effect the functionalities of each module and attain their verbal exchange over a ROS-based architecture.
We have additionally finished some work with physical robots. We developed the neural software for an easy Braitenberg robot that observed traces the usage of imaginative and prescient; this becomes based totally on our CA work. We are presently growing CA primarily based neural models for grasping manage which might be also neuro-cognitive fashions of a forestall challenge. More these days, we were operating at the forward version for a fast taking walks robotic. This work does no longer use currently make use of CAs. Instead, it approximates preferred analytical fashions (like a cart and pole) with factor neurons; neurons are turing whole. The plan is to hold on with this work. We can explore the usage of CAs in virtual robots. It is my competition that following this approach, mimicking the human version as carefully as possible, physically, neutrally, and psychologically is the first-class way to get to Turing check passing AI. It additionally has the advantages of furthering our know-how of human neural and psychological processing and growing structures which can be useful. These more useful systems consist of robots
Jong-Hwan Kim
To increase agent-embedded robots with system intelligence (MI), the design of intelligence working architecture (IOA) is needed for sensing, wondering and movement. One of the key modules in IOA is the reminiscence module for storing temporal occasion sequences of responsibilities, the mechanism of idea for reasoning, and movement making plans for execution, amongst others. This talk introduces how to increase agent embedded robots with MI primarily based on IOA, that specialize in long-term reminiscence for lively expertise acquisition and adaptive know-how application. The lengthyterm reminiscence is advanced as an integrated multireminiscence neural model, wherein episodic memory is designed the use of a Deep DRN (Developmental Resonance Network) neural model and semantic memory is constructed the usage of the DRN-tree. Procedural reminiscence is likewise designed using the context-based RNN (recurrent neural community) to keep the trajectories of the manipulators at the side of context facts and then retrieve them in step with the context without conscious thinking. Robots are taught both via human demonstration or symbolic description. A conduct suitable to the modern situation is selected with the aid of the mechanism of concept discovered through device intelligence studying, at the same time as a proper challenge is retrieved from the Deep DRN model. The behaviors are done safely and fast with the movement planning set of rules. The effectiveness of the agent-embedded robot improvement is demonstrated thru experiments with a humanoid robot, Mybot, evolved in the Robot Intelligence Technology Lab. At KAIST, Agent embedded Mybot is introduced specifically for herbal interactions such as VQA (Visual Question Answering) with human beings. In the remaining part, AI World Cup shall be delivered, which has three classes, AI Soccer, AI Commentator, and AI Reporter.
Robots are machines or mechanical human beings which are designed to help humans with arduous and complex duties. However, such robots aren't any greater simply mechanical layout rather they've emerge as smarter with time and development of technologies. AI developments have precipitated evolution and higher ability in robots. Even robotics and AI together can revolutionize nearly any industry for the more desirable. Artificial intelligence (AI) and robotics have turn out to be more and more hot subjects in the press and in academia. In October 2017, Bloomberg published a piece of writing claiming that artificial intelligence is probably to be the “most disruptive pressure in technology inside the coming decade” and caution that corporations which are sluggish to embody the technology may additionally risk extinction. Similarly, the subsequent month, the Financial Times declared
that the “robotic navy” is remodeling the worldwide place of work. This hobby is possibly due to the speedy gains that synthetic intelligence has been making in some programs, inclusive of photo recognition and abstract strategy games, and that advanced robotics has been making in labs, despite the fact that vast industrial applications can be lagging. Scholars were more and more interested in the monetary, social, and distributive implications of synthetic intelligence, robotics, and other kinds of automation. For instance, over the last 2 years, economists at the University of Toronto have convened meetings across the economics of artificial intelligence, which have been attended by means of a spectacular array of economics pupils from numerous factor of views inclusive of Nobel Prize winners Edmund Phelps, Paul Romer, Joseph Stiglit Some research has taken a morez, and others. There are some of well-attended meetings for felony, manufacturing, technical, and well known-interest groups which includes the World Conference on Robotics and Artificial Intelligence, We Robot, and AI Now. Organizational students are a chunk overdue to the sport and have only just started out to awareness on the organizational implications of artificial intelligence, robotics, and different kinds of advanced technology. However, as we describe on this primer, we believe that these technology present a completely unique opportunity for organizational pupils. Periods of high-quality technological exchange can result in first-rate development but also incredible turmoil. For example, while the steam engine caused superb monetary increase.
While many instructions can be drawn from previous episodes of automation, it's miles possible that synthetic intelligence and robotics may have precise results. Differences from previous episodes of automation encompass that the character of business hobby has shifted dramatically over the past decade such that many companies now depend on platform (i.e., 2sided marketplace) business models, artificial intelligence is likely to have an effect on white-collar people more so than blue-collar people (whilst perhaps robotics may also have an effect on blue-collar workers extra than white-collar people), and artificial intelligence may additionally have an effect on the links between establishments and companies.
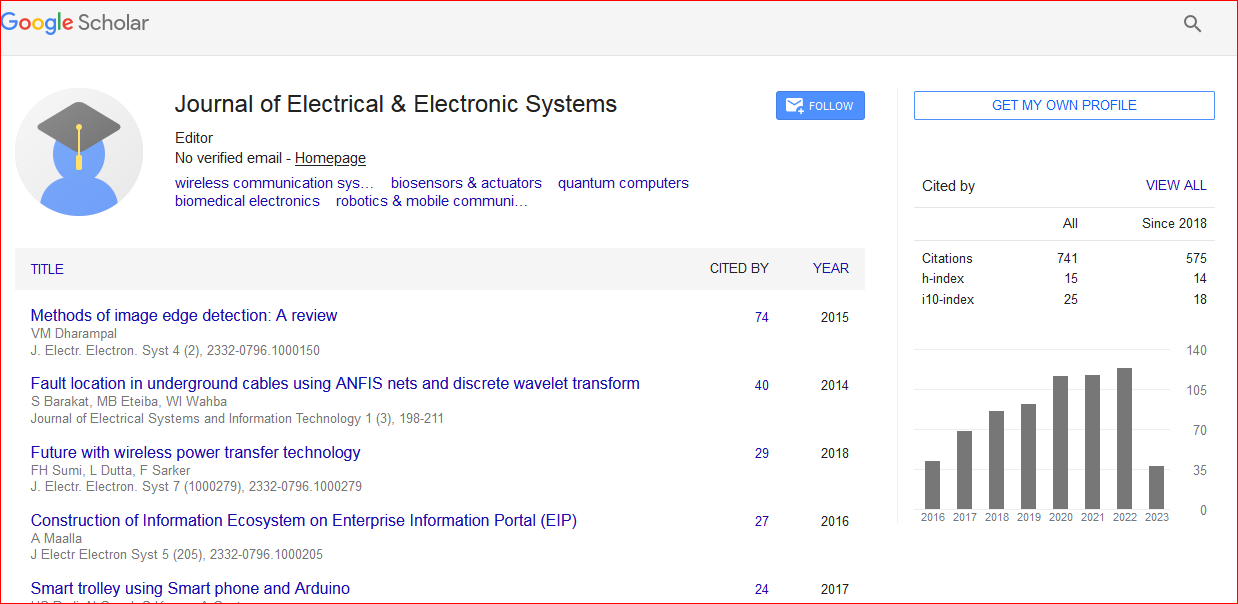
Journal of Electrical & Electronic Systems received 733 citations as per Google Scholar report

 Spanish
Spanish  Chinese
Chinese  Russian
Russian  German
German  French
French  Japanese
Japanese  Portuguese
Portuguese  Hindi
Hindi 