Christian Huyck
Cell Assemblies (CAs) are critical to human and mammalian cognition and behavior. A CA is a group of neurons which can keep firing without external stimulation. Our symbolic principles, like dog, are represented by means of CAs. Many non-human mammals do no longer have symbols, but they do have concepts. So, a rat will probably have a time-honored CA for cat, a good way to hearth while a cat is gift. There is a large hole in the educational community’s knowledge of CAs, how they affect motor control, and the way they regulate sensing. Hybrid meeting strains hold up with the economic wishes for superior manufacturing solutions, more desirable product satisfactory, manufacturing flexibility, cost discount and ergonomics development. There are a couple of operations in the guide methods that require extra flexibility and robustness. Despite the reality that commercial robots are utilized in a extensive variety of production strains, there aren't considered mature enough to be in close collaboration with the humans. This keeps up with the reality that the human abilities can't be absolutely changed by way of those of the robots; but, it's far possible for a strategy to be performed by way of combining the abilities of each side. Last but not least, the unconstrained conditions in production lines, together with variable lighting fixtures situations, the crossing people and the independent cell units, which include the automated guided automobiles, are a few essential reasons that initiate the collaboration in complex assembly cells. Theoretically, my CA for stroll to the door is firing after I am walking to the door, but it isn't always clear how that interacts with valuable sample turbines (CPGs), or even if those neurons that execute the CPG are part of the CA. Similarly, it is clear that, for instance, neurons inside the primary visible cortex are concerned when a human view a dog, but it isn't totally clear how they lead to the ignition of the canine CA, or which neurons are inside the dog CA.
There is a Human-Robot Collaboration (HRC) framework proposed, permitting sequential human and robot obligations execution. It belongs to the shared duties and workspace in terms of human–robotic interplay (HRI), when the tasks of human and robot sources are sequential. The proposed technique focuses on the mission allocation between a couple of human and robotic resources that constitute a hybrid meeting cell. A sensible choice-making algorithm is the premise for the duties allocation, thru the assessment of a couple of criteria including imply flow time.
As there's a gap, I, and my collaborators, are trying to fill the gap. I am a laptop scientist, so I am trying to expand packages based totally on CAs. In particular, we assume embodiment is essential, and that operating from simulated neurons is
important. So, we paintings with robots, virtual and physical. We paintings with spiking neurons, typically point fashions. We were growing neural topologies that can be used for virtual agents. We are actually operating as a part of the Human Brain Project, developing topologies that may be reused by means of others to enforce sellers. We have executed a truthful little bit of paintings on developing “higher” function which include neuro-cognitive models of natural language parsing and studying a -preference venture.
An analysis approximately the selection steps in task allocation consists of the assets suitability, availability and processing time. The interplay between a human and a robotic is accomplished thru a depth sensor and the gesture handler software program device. The software implements a undertaking scheduling generation, the human–robotic (HR) duties execution and the interplay among them. The individual elements of the cell are the two robots, the depth sensor and the human. A variety of ROS nodes have been developed aiming to put into effect the functionalities of each module and attain their verbal exchange over a ROS-based architecture.
We have additionally finished some work with physical robots. We developed the neural software for an easy Braitenberg robot that observed traces the usage of imaginative and prescient; this becomes based totally on our CA work. We are presently growing CA primarily based neural models for grasping manage which might be also neuro-cognitive fashions of a forestall challenge. More these days, we were operating at the forward version for a fast taking walks robotic. This work does no longer use currently make use of CAs. Instead, it approximates preferred analytical fashions (like a cart and pole) with factor neurons; neurons are turing whole. The plan is to hold on with this work. We can explore the usage of CAs in virtual robots. It is my competition that following this approach, mimicking the human version as carefully as possible, physically, neutrally, and psychologically is the first-class way to get to Turing check passing AI. It additionally has the advantages of furthering our know-how of human neural and psychological processing and growing structures which can be useful. These more useful systems consist of robots
Share this article
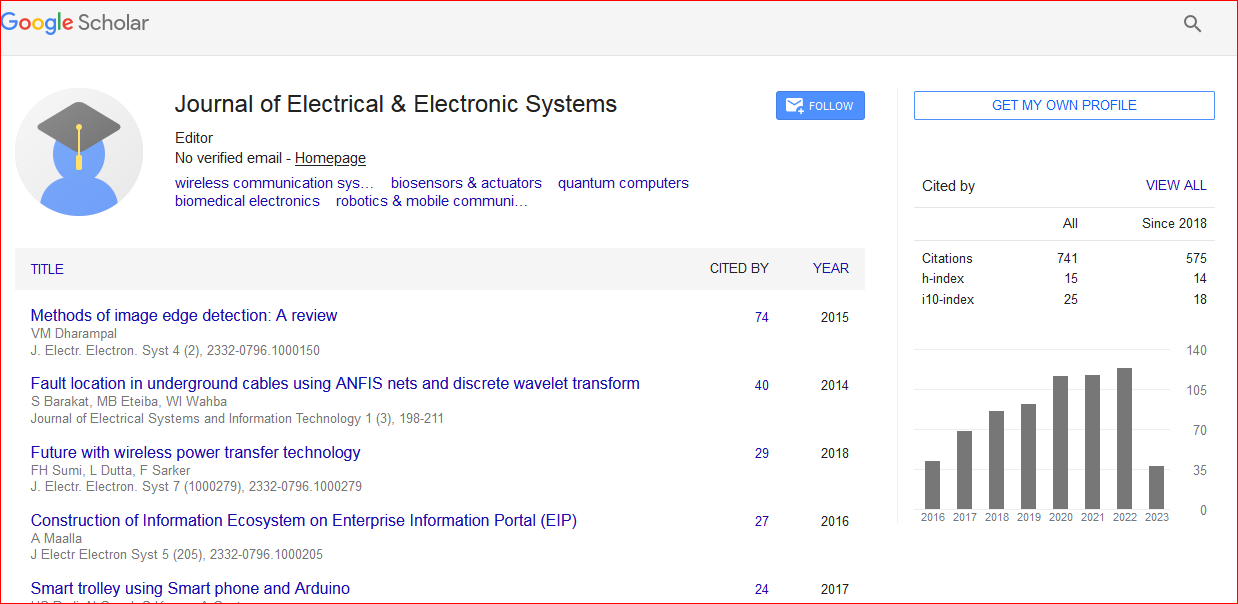
Journal of Electrical & Electronic Systems received 733 citations as per Google Scholar report