Our hearing sense allows us to perceive all kinds of sounds (speech, music, phone ring, closing a door, etc.) in our world, whether we are moving or not. To operate in human and natural settings, autonomous mobile robots should be able to do the same. This requires the robots not just to detect sounds, but also to localise their origin, separate the different sound sources (since sounds may occur simultaneously), and process all of this data to extract useful information about the world.
Related Journals of Robot Audition
International Journal of Robotics Research, International Journal of Robust and Nonlinear Control, Transactions on Robotics, Transactions on Dependable and Secure Computing
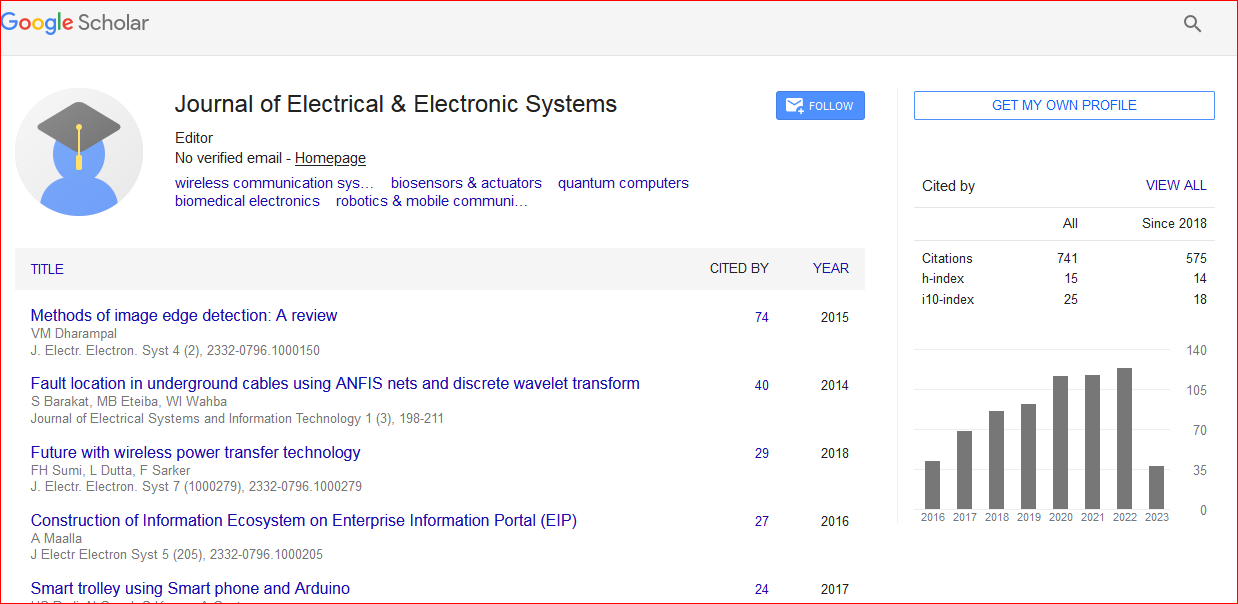
Journal of Electrical & Electronic Systems received 733 citations as per Google Scholar report

 Spanish
Spanish  Chinese
Chinese  Russian
Russian  German
German  French
French  Japanese
Japanese  Portuguese
Portuguese  Hindi
Hindi 