Philip R Buskohl
Self-governing mechanical technology and automated vehicles keep on upsetting the operational model of different businesses, going from transportation and assembling to safeguard. Selfsufficiency anyway requires a stage with both nearby and worldwide situational mindfulness. The related control framework, including sensors, actuators, calculation, data move, and information stockpiling, expands the intricacy of the stage dramatically. A vital test to this vision is disaggregating concentrated control techniques into a various levelled network where some self-sufficiency (spatial and transient) is nearby, much like the autonomic versus the substantial sensory system. While a significant part of the push to address this test has zeroed in on improved calculations for union of worldwide sensor information, an elective way to deal with neighbourhood self-sufficiency is to re-evaluate how we think about designing a material to carry on in a climate. In this investigation, structure disfigurement and material responsiveness is redeciphered into the language of intelligent administrators, raising the degree of choice usefulness at the material/structure level. Along these lines, an ideal reaction work dependent on natural detecting, data handling, and mis-shapening memory rises out of the synergism between the structure and material, which we will show in a moistness responsive, origami structure. This change in outlook gives a huge occasion to reconsider how self-governing usefulness can be disseminated across an advanced mechanics framework to share and decentralize the data handling.
PDFShare this article
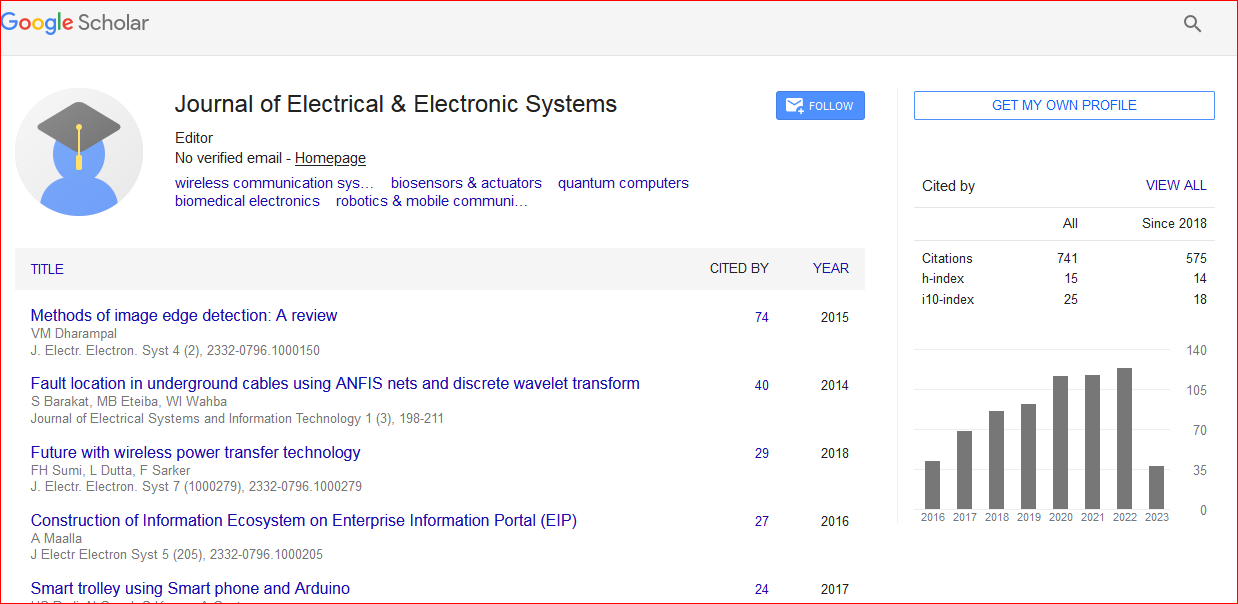
Journal of Electrical & Electronic Systems received 733 citations as per Google Scholar report