Hongliang Ren, Wei Liu and Shuang Song
Accepted Abstracts: J Biosens Bioelectron
Surgical navigation systems enable surgeons to carry out surgical interventions more accurately and less invasively, by tracking the surgical instruments inside human body with respect to the target anatomy. In order to get the real-time position and orientation measurements of surgical instruments in the surgical field, we developed a new miniature tracking device, which is aiming to overcome the constraints of line-of-sight and interference in surgical environment. Currently, optical tracking (OPT) is the gold standard in surgical navigation systems because of its accuracy but is constrained by direct line of sight (LOS) between camera sensors and markers. Electromagnetic tracking (EMT) technology is an alternative without the requirement of LOS, whereas EMT is prone to measurement errors caused by environmental ferromagnetic distortion. An idea for solving these dilemmas is to integrate respective strengths to overcome the corresponding weaknesses. Instead of conventional postacquisition loosely coupled fusion of sensor measurements, we built a real-time hybrid tracking system as illustrated in the below figure and developed a ?pre-data fusion? method, which emphasizes the interactive and tightly coupled fusion of EMT and OPT sensor data for pose estimation. The primary contribution of this study is that LOS problem and point correspondence problem can be mitigated using the initial measurements of EMT, and in turn the OPT result can be the initial value for non-linear iterative solver of EMT sensing module, in order to increase the tracking accuracy of EMT. The experiments show that the mean position estimation error is 0.87 mm.
Hongliang Ren is currently an assistant professor and a PI of medical mechatronics in National University of Singapore (NUS). He received his Ph.D. in Electronic Engineering from The Chinese University of Hong Kong (CUHK), and conducted postdoctoral research in the Johns Hopkins University, Surgical Innovation Institute of Children's National Medical Center, and the Pediatric Cardiac Bioengineering Lab of Children's Hospital Boston & Harvard Medical School. His research interests are in Computer-Integrated Surgical (CIS) systems, biomedical mechatronics, medical robotics and sensing technologies.
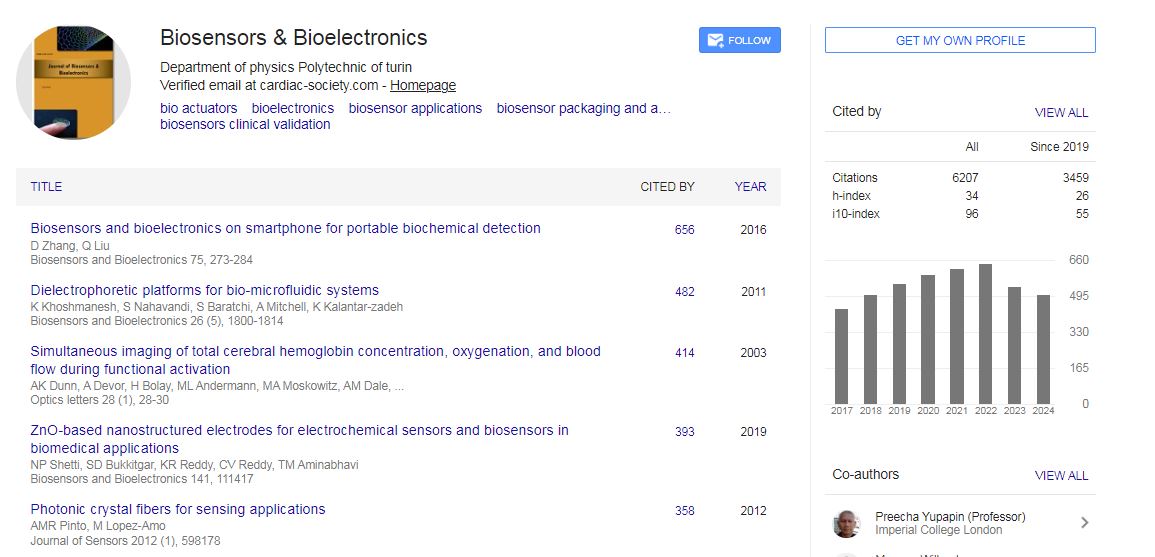
Biosensors & Bioelectronics received 6207 citations as per Google Scholar report

 Spanish
Spanish  Chinese
Chinese  Russian
Russian  German
German  French
French  Japanese
Japanese  Portuguese
Portuguese  Hindi
Hindi 