Research Article - (2023) Volume 14, Issue 3
Received: 23-Sep-2019, Manuscript No. JPM-23-2813;
Editor assigned: 26-Sep-2019, Pre QC No. P-2813 (PQ;
Reviewed: 14-Oct-2019, QC No. Q-2813;
Revised: 14-Jun-2023, Manuscript No. R-2813 (R);
Published:
12-Jul-2023
, DOI: 10.37421/2090-0902.2023.14.432
, QI Number: JPM-23-2813
Citation: Mkhize, Thembinkosi. "The Interpretation of Static
Motion." J Phys Math 14 (2023): 432.
Copyright: © 2023 Mkhize T. This is an open-access article distributed under the terms of the creative commons attribution license which permits unrestricted
use, distribution and reproduction in any medium, provided the original author and source are credited.
This study is conducted upon static mechanics. In physics, static mechanics is a field of statics. Through static mechanics, we investigate the mechanism of the universe via mathematical interpretations and axiomatic interpretations. We found that the universal mechanism is static; we mean: all motion of bodies’ celestial bodies, quantum bodies in the universe is still. The implication of this finding is that all motion in the universe is an illusion; there is no motion of bodies.
Interpretations • Static mechanics • Celestial bodies • Quantum
Significance of the main findings
Static mechanics is an already established conception in physics, but ours contains its own symbols which are explained. Moreover, it is rooted upon established math like geometry and complex analysis. Interestingly, the pure math contained in this conception has proved true the assumptions of the Riemann hypothesis. The Riemann hypothesis is an unproved hypothesis in the mathematical field of complex analysis. Static mechanics also proved true the statement of the Navier-Stokes existence and smoothness problem. Static mechanics has also unlocked new math in the field of complex analysis; this new field being “hyper complex analysis”. Through the interpretation of static motion, static mechanics also shows us that no matter how abstract a mathematical concept is, it can always be used to interpret the mechanism of nature. The results found are applicable to static field when studying static energy; static energy is the universal fundamental energy. Universal fundamental energy is universal elementary energy [1-3].
Axis
The interpretation of static motion is concerned with the essence of an axis; the interpretation of static motion is a study of the mechanism of an axis.
Mechanism of an axis: There is no axis that means there is no direction from an axis and there is no distance from an axis.
Distance and direction
From an axis, what comes first? Is it the direction to the right or is it the distance to the right? Below we reason that from an axis, both direction and distance are inseparably entwined; we mean: Direction is distanced and distance is directed.
1st reason: Where there is “distance”, there is also “direction” to that “distance”. From an axis, “distance” is “directed”; it is impossible to go through “distance” without taking a specific “direction”.
2nd reason: Where there is “direction”, there is also “distance” to that “direction”. From an axis, “direction” is “distanced”; it is impossible to take a specific “direction” without going through “distance”. Also, it is impossible to “direct” where there is no “distance”; “direction” is “distanced”. Both “distance” and “direction” are one because we cannot separate distance from direction and we cannot separate direction from distance [4].
Direction
The science of static frame rotation; the motion after the rotation of a static frame in space; this science is to show that there is actually no true direction in space; true direction is an illusion. Assuming that the static frame below is human geometric illustration represents the dimensions the static frame is situated in space (Figure 1).

Figure 1. The changes of static frame observe is rotation by (X) degrees.
The results found are applicable to static field when studying static energy; static energy is the universal fundamental energy. Universal fundamental energy is universal elementary energy.
The assumption is given as:
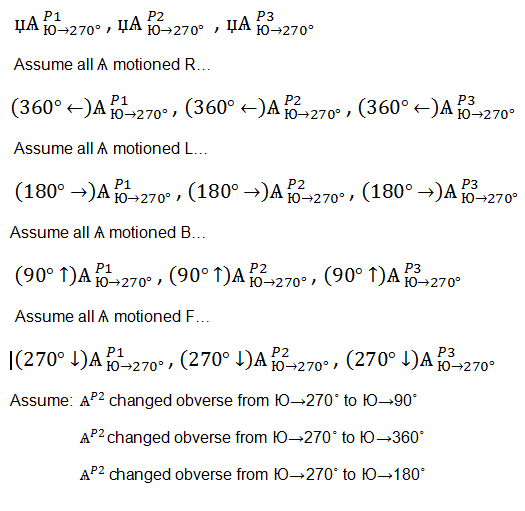
This also means that the right side of a static frame shall always face the right side of space; there is “true distance” in such space.
This also means that the right side of a static frame shall always face the right side of space; there is “true distance” in such space.
“True direction” in space is an idea, not a fact; there is, in fact, no “true direction” upon space
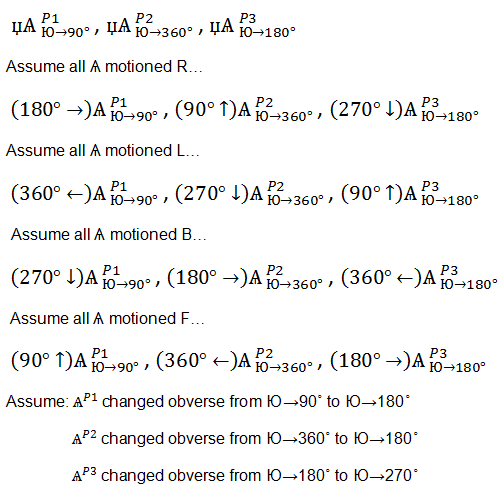
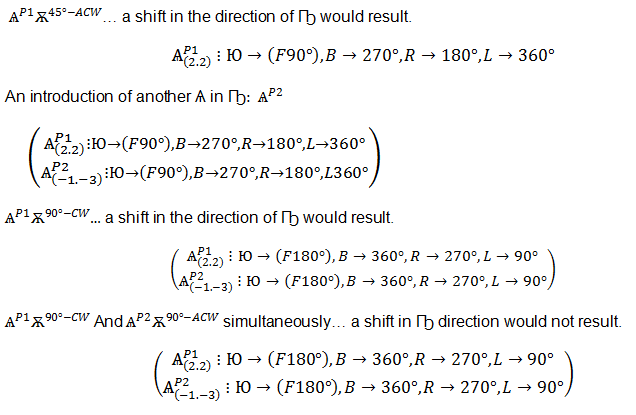
Static frame and space with true direction: In a space with “true direction”, the right side shall always be on the right side, since there is “true direction” going to the right side. This also means that the right side of a static space shall always face the right side of space; there is “true distance” in such space. Below are geometrics of such space (Figure 2).

Figure 2. Static frame and space with true direction/distance.
The results are given as below:
The situation on point 10 would make the rotation of static frame P1 and static frame P2 different directions impossible, since space would only rotation a single point of direction at once. This situation becomes more impossible when we factor in a complete set of rotation combinations upon a single space. A space with true “direction” is impractical; it does not allow a simultaneous static frame rotation into different “directions” [5].
A space with” true direction” continued
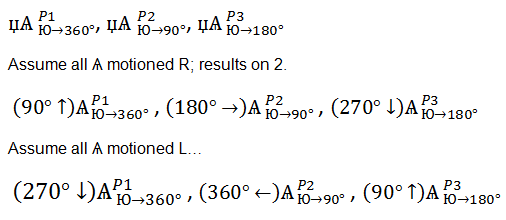
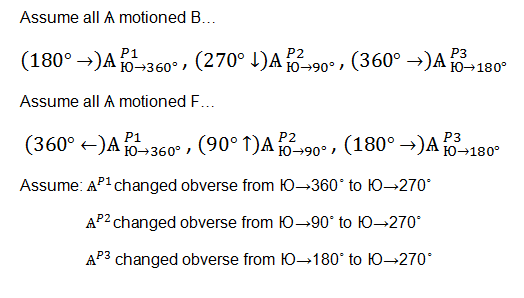
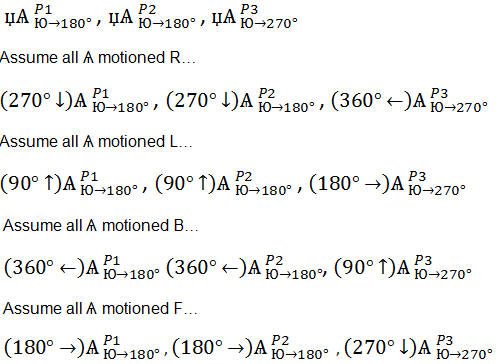
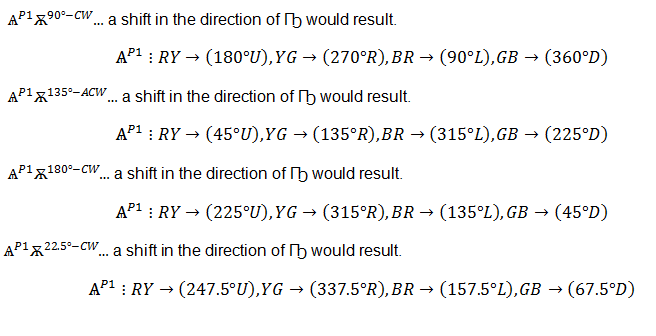
Below we further illustrate the impracticality of a space with “true direction”; such impracticality, we illustrate via a different rotation combination. The diamond shape illustration below static frame P1 and space (Figure 3) [6-8].

Figure 3. The diamond shape illustration is divided into four segments; red, blue, yellow and green.
If 900° truly represented direction UP, then point (R/Y) would always face the same direction (UP). This effect would apply even on rotates of static frame. Low is the mechanism of the geometric of such space.
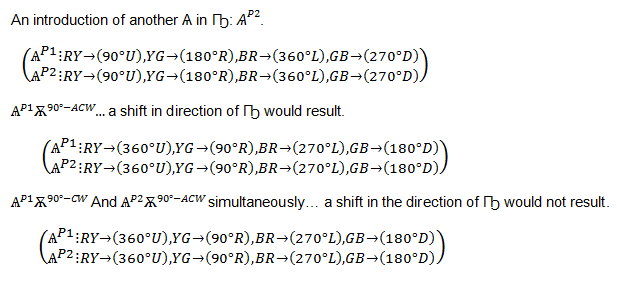
This situation would make the rotation of static frame P1 and static frame P2 into different directions impossible, since space would only rotation to a single point of direction at once. This situation becomes more impossible when we factor in a complete set of rotation combinations upon a single space. Static space with true “direction” is impractical; it does not allow a simultaneous static frame rotation into different “directions” [9].
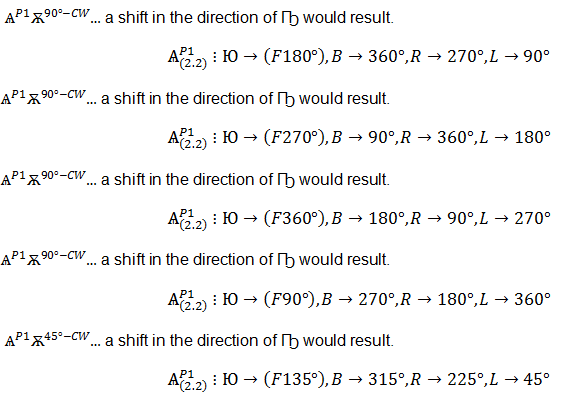
Our space allows simultaneous rotation of different rotation combinations. This is because there is no “true direction” in our space. Below is the mechanism of the geometric of our space.
The geometric of our space is abstract; our space is a conceptual fact, not physical fact our space is an illusion.
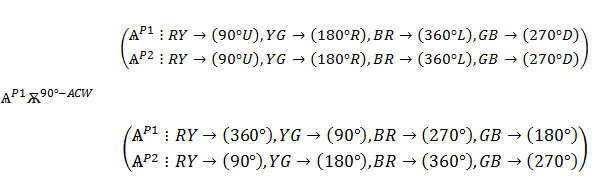
Our space directions are not fixed, they are flex this because there is no “true direction” in our space. Our space allows the 6 principle rotation combinations simultaneously.
What allows the simultaneous rotation combinations upon our space is “no direction” and “no direction is any distance”. The rotation of static frame in our space is static; we mean: The rotation of static frame in our space is a conceptual fact an illusion, not a physical fact. There is no distance in our space to occupy physical facts [10].
Circular motion
Already established mathematics has already proved that circular motion is not equivalent to rotation; the rotation refers to the ability of a static frame to change direction via rotation and circular motion refers to the ability of a static frame to motion in circular fashion.
Rotation: It is concerned with the ability of a static frame on an axis to change its direction. The rotation of a static frame does not need to be complete (360°), it only needs to allow a static frame to change direction by (X°).
Motion in circular fashion: Motion in circular fashion needs to be complete (360°) to be regarded as motion in circular fashion. Static frame can also rotate while in circular motion and static frame can also not rotate while in circular motion.
A space with true direction does not allow static frame rotation while such static frame is in circular motion. However, it does allow such static frame to motion in circular fashion without rotation. Space and rotation with no true direction allows static frame rotation while such static frame is in motion in circular fashion and also allows static frame to motion in circular fashion without rotation. Space with true direction had only handicaps “static frame rotation” in such space and not static frame motion in such space. Static frame motion in such space is preserved by the distance in such space [11].
A mathematical interpretation of our space
Right, left, forth, back, up, down are all imaginary directions; we mean: Our space is a zero dimension space, not a three dimension space. There are no dimensions in our space.
There is no direction/distance to measure; our space is a zero dimension space.
Distance
Above we observed that from an axis, direction is distanced and distance is directed; both distance and direction are inseparably entwined. Under “direction” we observed that there is no “true direction” in our space, therefore, there can never be “true distance” in our space. Below we observe is also an illusion (Figure 4).

Figure 4. The “distance” in our space.
Space distance is measured by static points; any amount of distance between static points is equivalent to 0.
This because there is no distance to measure; we mean: There is in fact no distance between static points [12].

Above we observe that all static points are in essence the same point: An axis.
All static points allow static frame rotation; the only point that allows static frame rotation is an axis. This means any amount of distance is static; any amount of distance is equivalent to 0.
A sub section of distance
The 2nd observation of an axis: The equation shows that space is a single fabric; space is one. Below is a static reflection interpretation of space is equals to 0. Static reflection interprets that all static points reflect an axis and an axis reflect all static point and that all static points reflect each other via the same point. All points are in essence the same point: An axis the foundation of the below observations is purely axiomatic, its core purpose is to allow an insight upon the equation: All static points reflect an axis; an axis reflects all static points. Our main focus is showing that size of static frame and the amount of distance [13].

8 mirrors facing an axis are positioned on points: 45, 90, 135, 180, 225, 270, 315 and 360 degrees static frame positioned on the axis. The amount of “distance” between static frame and each of the 8 mirrors is 2 meters; length of each mirror: 210 cm. width of each mirror: 90 cm height of each static frame: 180 cm. width of each static frame: 45 cm (Figure 5).

Figure 5. The reflection of static frame.
The reflection of static frame P1 is visible on all 8 mirrors; length of each mirror: 210 cm; width of each mirror: 90 cm; height of each static frame: 180 cm; width of each static frame: 45 cm.
Assuming static P1 moved 2 meters towards the mirror situated on the 360° point, his reflection would still be visible on all 8 mirrors. His reflection would still be visible on all 8 reflective points if he moved 2 meters towards any of the other 7 reflective points; Length of each mirror: 210 cm; width of each mirror: 90 cm; height of each static frame: 180 cm; width of each static frame is 45 cm.
An increase in the amount of “distance between static P1 and the 8 mirrors; now the amount of “distance” between static P1 and all 8 mirrors is 100 km. Length of each mirror: 210 cm; width of each mirror: 90 cm; height of each static: 180 cm; width of each static: 45 cm. The reflection of static P1 would not be visible upon any of the 8 mirrors.
An increase in the size of static P1 length of each mirror: 210 cm. width of each mirror: 90 cm. height of each static frame: 100000 m; Width of each static frame: 45 000 m. Distance of the reflection of static P1 is visible on all 8 mirrors; length of each mirror: 210 cm; width of each mirror: 90 cm; height of each static frame: 180 cm; width of each static frame: 45cm [14].
The relationship between “size” and “distance” when dealing with the reflection of static frame upon plain mirrors 1st law: When static frames are reflected upon plain mirror(s), they become more visible as they move closer to the “point of reflection” and they become less visible as they move further away from the “point of refection”. From the lst law we deduce the 2nd law.
2nd law: A static frame reflected upon a plain mirror, is infinitely reflected upon it if it infinitely moves further away from the “point of reflection” while it (static frame) infinitely increases in size.

Mathematical interpretation : The “distance” from A to B is equivalent to the “distance” from B to A; irrespective of the amount of “distance” between axis and 1 static point, the distance from axis to 1 static point is always equivalent to the amount of distance from 1 static point to axis. All static points are equivalent to an axis; all points are in essence an axis. All points allow static frame rotation. An axis is equivalent to all static points.

Axis is equivalent to space because axis is inside space. An axis that allows static frame rotation is inside a space with no “distance/direction”. Upon geometric plains, an axis is the starting point; we mean: An axis is equivalent to 0.
Static frame
The equations found above also suggest that static frame is also static, since they exist upon a sphere that bares no distance; static frame is static because they exist upon an axis and an axis is inside.
The motion of static frame in space
The above equations suggest that the motion of static frame inside space is static.
Below is a description of static change in a static system the static system is space.
Refined static motion solution: Equation
The below equation refers to static change in static system. The change is static because it changes upon:

The below equation also refers to static change in static system. However, the below equation is based upon the rotation of the diamond shape illustrated further above. The change is static because it changes upon:

The above static motion solutions apply to all types of static frame and static motion: Bending, twisting, vibration, spring etc., we limit our solutions to straight static motion and rotation=static motion only, because both types are central in proving true the conceptions of static mechanics. Our reality is conceptual not physical; the change we perceive as physical is in essence conceptual because such change is equivalent to zero change is static.
Static motion
A compilation of all of the above describes the energy of static motion.

Static justification for the application of the division operator upon 0.
Essence static energy inside static energy:

Static reality
Our reality is the energy of static motion.
Our reality is a conceptual fact, not a physical fact.

The Riemann hypothesis
The Riemann hypothesis is an unproved hypothesis in the field of pure mathematics and it is also one of the seven millennium problems chosen by the Clay mathematics institute. Via the hyper complex analysis used to interpret static motion, we observe true the 3 assumptions summoned by the Riemann hypothesis.
1st assumption: Non trivial zero have real part equal to half.
2nd assumption: 0 ≥ ∞
3rd assumption: 100% is always undefined in both complex analysis and hyper complex analysis.
Complex analysis and hyper complex analysis
Complex analysis is based on imaginary numbers and hyper complex analysis is based on static points static points are imaginary points.

Complex analysis is used to interpret the Riemann hypothesis and hyper complex analysis is used to interpret static motion.
1st assumption of the Riemann hypothesis: The non-trivial zero has real part equals to half.
Assumption of static mechanics
The below percentages represent close approximations of 100%.

The below percentages represent close approximations of 100%.

The below percentages represent close approximations of 100%.
The concept of “one”
On a number line, you have to get to 0.1 before you get to 1. You have to get to 0.01 before you get to 0.1. You have to get to 0.001 before you get to 0.01. You have to get to 0.0001 before you get to 0.001 this pattern to infinite. On a number line, you have to get to 1 before you get to 1.1. You have to get to 1.01 before you get to 1.1. You have to get to 1.001 before you get to 1.01. You have to get to 1.0001 before you get to 1.001 these patterns to infinite.
The combination of the above equations; no inception is equivalent to no ending.
Square root
The equations of the square roots are given below:
Average of keys
Established mathematics and computational instruments maintain that we cannot divide by 0(zero). Dividing by zero is a great sin in mathematics. However, static mechanics has showed us that we actually can divide by 0(zero). A complete thing can be divided an infinite times and 0 ≥ ∞. A complete thing can also be divided by 0, since the equation is 0 ≥ ∞ and 1/0=0 ≥ ∞.
That we can divide by 0 means that we can also divide 0 by 0. Static mechanics has showed us that we can divide 0 and that we can divide by 0.
2nd assumption of the Riemann hypothesis: According to the Riemann hypothesis. 1+2+3+4+5+6+7+8=1/12 ≥ 0.
Assumption of static mechanics
According to static mechanics the below equation is shown.

3rd assumption of the Riemann hypothesis: According to the Riemann hypothesis: Riemann zeta function of 1 undefined.
Assumption of static mechanics: According to static mechanics 1 undefined because 1 has no boarders; 1 is static.

The Riemann zeta function and complex analysis
To show that nontrivial zeros of have real part equal to half you actually have to insert 1 upon the Riemann zeta function. The reason why 1 is undefined upon is because:

To realize that nontrivial zeros of zeta have real part equal to half actually have to insert 1 upon the Riemann zeta function. We observe that is impossible to find this truth via “complex analysis” because zeta is undefined in the geometric of “complex analysis”.
To realize that nontrivial zeros of zeta have real part equal to half actually have to insert 1 upon the Riemann zeta function. We observe that is impossible to find this truth via “complex analysis” because zeta is undefined in the geometric of “complex analysis”.
“Complex analysis” is limited in its scope of analysis because it is based on a 2 dimension space. We believe that “hyper complex analysis” is broad in its scope of analysis because it is based on a dimensionless space, which is in fact our space is shown in equation format.

Pure geometry can only be determined via mechanics, not via basic arithmetic and not even via complex arithmetic, like “complex analysis”.
Navier-Stokes existence and smoothness
The Navier-Stokes existence and smoothness is an unproved phenomenon in mathematical physics and it is also one of the seven millennium problems chosen by the Clay mathematics institute. The specific statement of the Navier-Stokes existence and smoothness problem.
“In three space dimensions and time, given an initial velocity field, there exists a vector velocity and a scalar pressure field, which are both smooth and globally defined, that solve the Navier-Stokes equations.”
According to the sciences of “the interpretation of static motion” prove true the official statement of the Navier-Stokes existence and smoothness; we mean: Via the sciences of “the interpretation of static motion”, we prove that “In three space dimensions and time, given an initial velocity field, there exists a vector velocity and a scalar pressure field, which are both smooth and globally defined, that solve the Navier-Stokes equations.”
According to already established mathematics, the Navier-Stokes problem in two dimension space has already been solved positively: There exist smooth and globally defined solutions in two dimensions. The interpretation of static motion showed us that space is dimensionless; there are, in fact, no dimensions in space. That there are dimensions in space is a practical idea, not a fact [15].

Space combinations on a hyper complex plain and X, Y, Z on a Cartesian coordinate system.
Hyper complex plain coordinates
Single dimension: X ≥ LR; Y ≥ BF; Z ≥ UD
Two dimension: LR+BF ≥ XY; LR+UD ≥ YZ; BF=UD ≥ XZ
Three dimension: LR=BF=UD ≥ X+Y+Z
Refined equations of the above dimensions:
1st dimension is equivalent to all dimensions:

2nd dimension is equivalent to all dimensions:

3rd dimension is equivalent to all dimensions:

At last, we observe that LR, BF, UD and X, Y, Z are only useful for when it comes to the in depth analysis of space, but they are, in fact, non-exist. Since the Navier-Stokes problem in 2 (two) dimension space has already been solved positively, the solution to Navier-Stokes problem in 3 (three) dimension does exist; there exist smooth and globally defined solutions in 3 (three) dimension,since:

0 ≥ ∞ is how nature has no point of inception and no point of ending. Nature is a reflection of itself.
[Crossref] [Google Scholar] [PubMed]
[Crossref] [Google Scholar] [PubMed]
[Crossref] [Google Scholar] [PubMed]
[Crossref] [Google Scholar] [PubMed]
[Crossref] [Google Scholar] [PubMed]
[Crossref] [Google Scholar] [PubMed]
[Google Scholar] [PubMed]
[Crossref] [Google Scholar] [PubMed]
[Crossref] [Google Scholar] [PubMed]
[Crossref] [Google Scholar] [PubMed]
Physical Mathematics received 686 citations as per Google Scholar report