Department of Environmental and Occupational Health, Florida International University, Miami, USA
Mini Review
A Testing Based Dispersed Investigation Technique for UAV Bunch in Obscure Conditions
Author(s): Javed Khan*
A crucial task of a UAV cluster is quickly completing the exploration and construction of unknown environments. However, the formulation of a realtime detection map-based online autonomous exploration strategy remains a problem that requires discussion and improvement. The Distributed Next-Best-Path and Terminal (DNBPT) method is a distributed unknown environment exploration framework we propose in this paper for a UAV cluster that takes path and terminal state gain into complete account. In order to guide the UAV's subsequent decision, this method calculates the gain by comprehensively calculating the new exploration grid brought about by the exploration path and terminal state guidance to the unexplored area. We propose a reasonable multistep particular inspecting strategy and a better Discrete Parallel Molecule Multitude Enhancement calculation for way streamlining. The simulat.. Read More»
DOI:
10.37421/2161-0525.2023.13.714
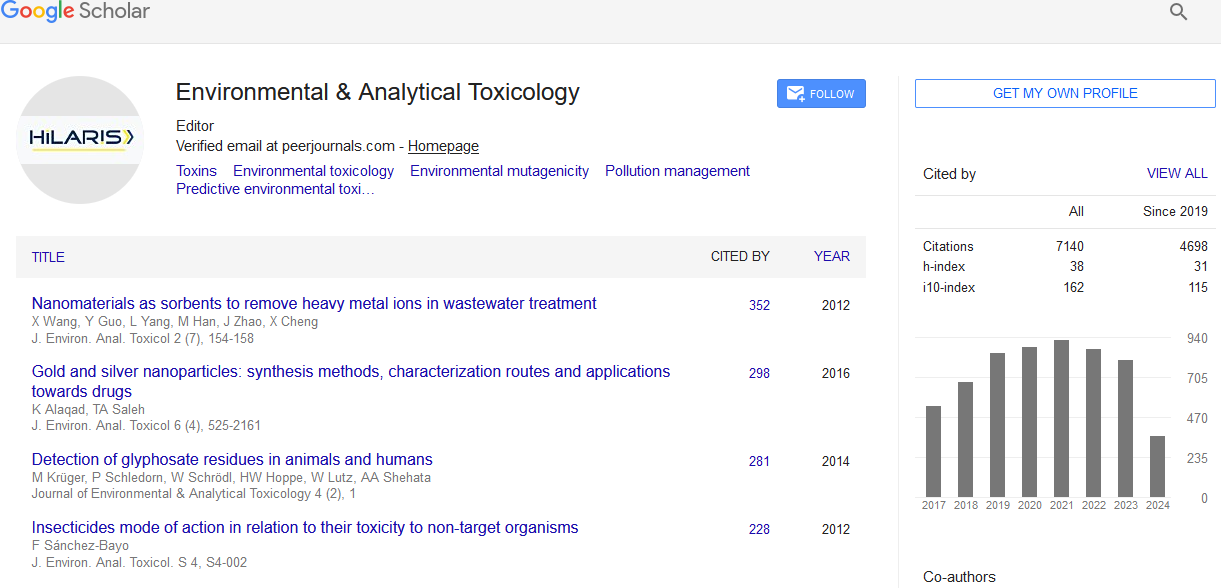
Environmental & Analytical Toxicology received 6818 citations as per Google Scholar report

 Spanish
Spanish  Chinese
Chinese  Russian
Russian  German
German  French
French  Japanese
Japanese  Portuguese
Portuguese  Hindi
Hindi 