Ayman Al-Khazraji
Accepted Abstracts: Ind Eng Manage
This paper deals with the synthesis of adaptive type-2 fuzzy logic controller for a class of single-input single-output system. Due to its ability in serving in universal approximation, the type-2 fuzzy logic system is used to approximate the unknown system dynamics, which will be adjusted according to the on-line adaptation laws deduced from the stability analysis. To ensure the closed loop system robustness, a modified sliding mode control signal is used. In this work, variable sliding surface is replaced by type-2 fuzzy logic system in order to reduce the starting energy without deteriorating the tracking performances. Furthermore, the knowledge of the upper bounds of the external disturbances and also the approximation errors is not needed. All signals involved are uniformly bounded. Finally, experimental results are presented to show the performance of the developed approach.
Ayman Al-khazraji received the BSc degree in computer engineering and MSc degree in mechatronics both from the university of technology, Baghdad-Iraq in 1998 and 2000 respectively. In 2008, he received the PhD degree in Control Engineering from Reims University, France. He spent more than 5 years in teaching and research at Reims University, France. He is working, since June 2011, as an expert for different industrial enterprises such as GE and Alstom Power systems. He has more than 20 publications including book chapters, papers, conferences and technical reports. His research interesting includes robust adaptive systems, fuzzy controllers, AI applications in control, robotics and nonlinear system.
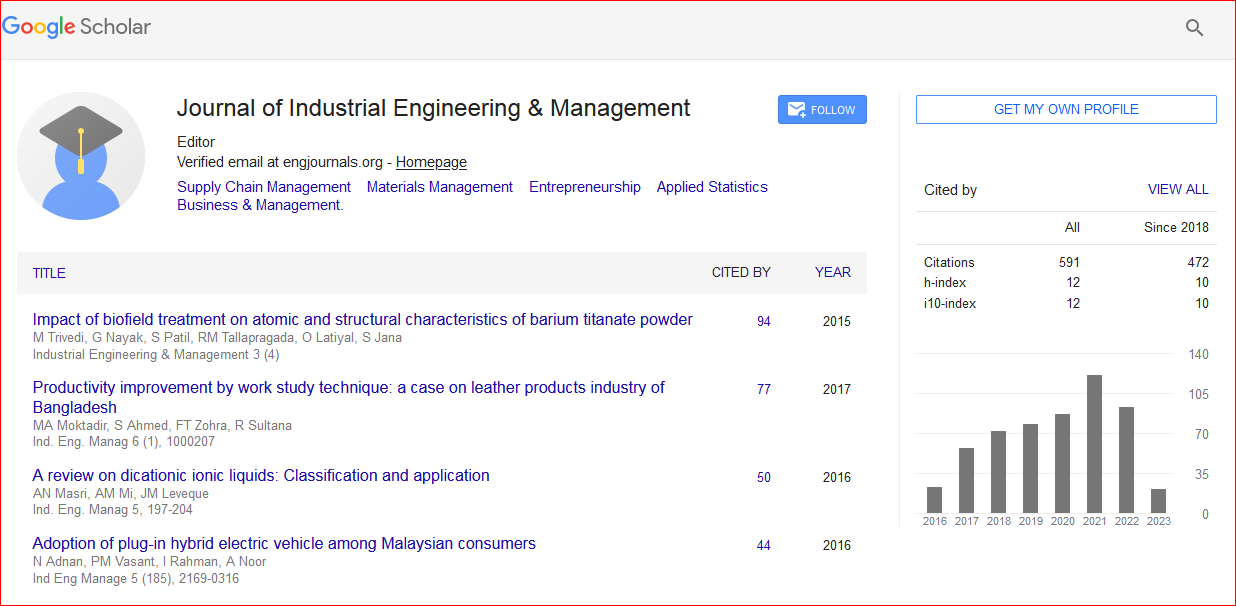
Industrial Engineering & Management received 739 citations as per Google Scholar report

 Spanish
Spanish  Chinese
Chinese  Russian
Russian  German
German  French
French  Japanese
Japanese  Portuguese
Portuguese  Hindi
Hindi 