Opinion - (2022) Volume 13, Issue 10
Received: 01-Oct-2022, Manuscript No. jpm-22-84299;
Editor assigned: 03-Oct-2022, Pre QC No. P-84299;
Reviewed: 17-Oct-2022, QC No. Q-84299;
Revised: 22-Oct-2022, Manuscript No. R-84299;
Published:
29-Oct-2022
, DOI: 10.37421/2090-0902.2022.13.392
Citation: Argaez, Josu. “A Parameter Set Automated Partition Approach is used to Provide Hypersonic Vehicles with Smooth Switching Linear Parameter-Varying Control.” J Phys Math 13 (2022): 392.
Copyright: © 2022 Argaez J. This is an open-access article distributed under the terms of the Creative Commons Attribution License, which permits unrestricted use, distribution, and reproduction in any medium, provided the original author and source are credited.
Smooth switching linear parameter-varying (LPV) controllers for hypersonic vehicles (HVs) are the focus of this systematic design approach. Smooth switching controllers are created by dividing the scheduling parameter set into subsets that overlap, and controllers in the overlapped subsets are smoothly scheduled between controllers in adjacent subsets, taking into account the switched LPV model of HVs. The conclusion is less conservative due to the achievement of a switching law with no limit on average dwell time. A novel set partition method with novel datum vertex selection and unpartitioned subset handling is proposed to automatically divide the parameter set. By resolving a convex optimization problem, the switching LPV controllers with the desired performance are constructed effectively. The effectiveness of the proposed smooth switching LPV controllers and parameter set division method is demonstrated by HV simulation results.
Hypersonic vehicles (HVs) are getting a lot of attention because they are seen as a safe and affordable way to get into space. HVs differ from conventional flight vehicles in a number of ways, including their large modeling uncertainty and intricate coupling effects. Furthermore, it is challenging to precisely measure or estimate the atmospheric properties and aerodynamic characteristics of HVs at high altitude due to the wide range of flight conditions in which they operate. The dynamics modeling and control of HVs are severely hampered by all of these characteristics, which make them complex systems with significant nonlinearity and uncertainty [1].
Numerous effective modeling and control methods, such as interval type- 2 fuzzy systems, robust non-linear control backstepping attitude control and linear parameter-varying (LPV) systems have been developed to deal with the non-linearity and uncertainty of this kind of complicated systems. Furthermore, switching LPV control methods have been extensively studied in recent literature for LPV systems with a wide parameter variation range. Multiple parameter-dependent Lyapunov functions have been used to switch control of LPV systems in. The results were applied to an active magnetic bearing system in a model of an F-16 aircraft in and a water level control system for a nuclear steam generator in. Stability and H performance were looked at for a group of unstable discrete switched LPV systems in. A controller that ensures the tracking performance of the switched LPV model of HVs has been developed [2].
The switching LPV controllers described in may result in an undesirable transient response, which is one potential disadvantage. The creation of LPV controllers with smooth switching is one reasonable strategy for addressing this issue. conducted research on the issue of smooth switching state feedback control for aircraft systems with multiple operating points. The smooth switching LPV controllers were created in by interpolating LPV controllers in overlapped regions of any two subregions that were adjacent to one another. An improved approach to designing smooth switching LPV controllers has been proposed in which differs from in that it takes into account output feedback systems and both one-dimensional and two-dimensional spaces of gain-scheduling variables [3].
The lack of a methodical method for dividing the scheduling parameter set is another flaw in the methods. This truly intends that, to accomplish an ideal presentation, one might have to play with the quantity of divisions and their areas by experimentation. The design of switching gain-scheduling controllers for plants with measurable time-varying parameters the design of switching surfaces for the switching LPV controllers with hysteresis switching and the synthesis of multiple robust control systems in hard disk drives are some of the systematic approaches that have been proposed to address this flaw. The systematic approaches are more logical than the previous ones in due to the automatic division of the parameter set.
The smooth switching LPV control of HVs using a parameter set automatic partition method is the primary focus of this paper. The following is a summary of the main contributions made in this paper: i) Smooth switching output feedback controllers are built for the switched LPV model of HVs, and the switching law without limiting the average dwell time is obtained, making the conclusion less conservative. In addition, the significant distinction from the method in is that the control synthesis conditions can be efficiently solved as a linear matrix inequality (LMI) optimisation problem. ii) A method for automatically partitioning the scheduling parameter set is suggested. Our approach makes two significant improvements to the selection of the datum vertex and the handling of the unpartitioned subset when compared to that. The closed-loop system's desired performance is premised on the presentation of a systematic algorithm to divide the parameter set into as few subsets as possible [4].
The design approach for switching LPV controllers has been looked at in the available literature. One local LPV controller is designed for each predetermined subset of the scheduling parameter region under this strategy. In any case, a deficiency of this technique is that the boundary set is frequently separated by experimentation. To put it another way, if the divided subsets result in controllers that aren't up to par, we need to tune them heuristically, which is a time-consuming process. A parameter set automatic partition method will be used to propose a systematic algorithm for designing smooth switching LPV controllers with the desired performance to address this issue. We begin by providing some descriptions for this algorithm in order to convey the main idea of the algorithm without going into excessive technical detail [5].
This paper investigated the control problem for the switched LPV model of HVs. To mitigate possible undesirable transient behaviour, smooth switching LPV controllers were devised by means of dividing the scheduling parameter set into subsets with overlaps. Furthermore, a systematic algorithm to design smooth switching LPV controllers satisfying a desired performance was proposed via a parameter set automatic partition method. The effectiveness and potential of the proposed method have been verified through its application to HVs, simulation results show that the flight control system, using the proposed method, has acceptable tracking performance over the entire time range and there is no undesirable transient behaviour when the switching occurs. Further works, such as designing controllers for HVs based on switched polytopic LPV approach and devising new methods to handle the non-linearity of vehicle systems, will be pursued in a follow-up research.
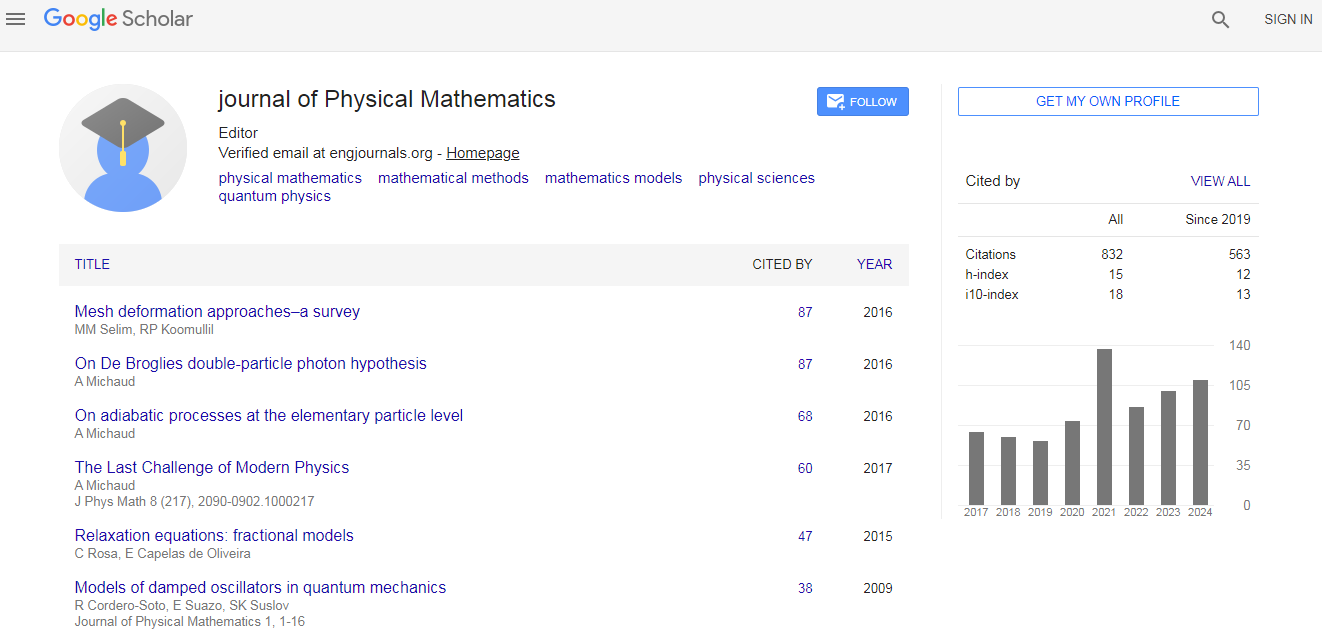
Physical Mathematics received 686 citations as per Google Scholar report