Scientists have fostered various fake fish to impersonate the abilities to swim of natural species and comprehend their biomechanical underwater abilities. The inspiration emerges from the interest to acquire further appreciation of the effective idea of organic motion, which is the consequence of millions of long stretches of development and transformation. Blade based natural species created remarkable abilities to swim and prominent execution in profoundly unique and complex underwater conditions. Accordingly, in light of examination by established researchers, this little survey focuses on talking about the mechanical gadgets created to execute the caudal propulsive portions of automated fish. Caudal components are of impressive interest since they might be intended to control inertial and gravitational powers, as well as applying extraordinary unique reach in automated fish. This original copy gives a compact survey zeroed in on the designing executions of caudal components of anguilliform, subcarangiform, subcarangiform, thunniform and ostraciiform swimming modes.
HTML PDFShare this article
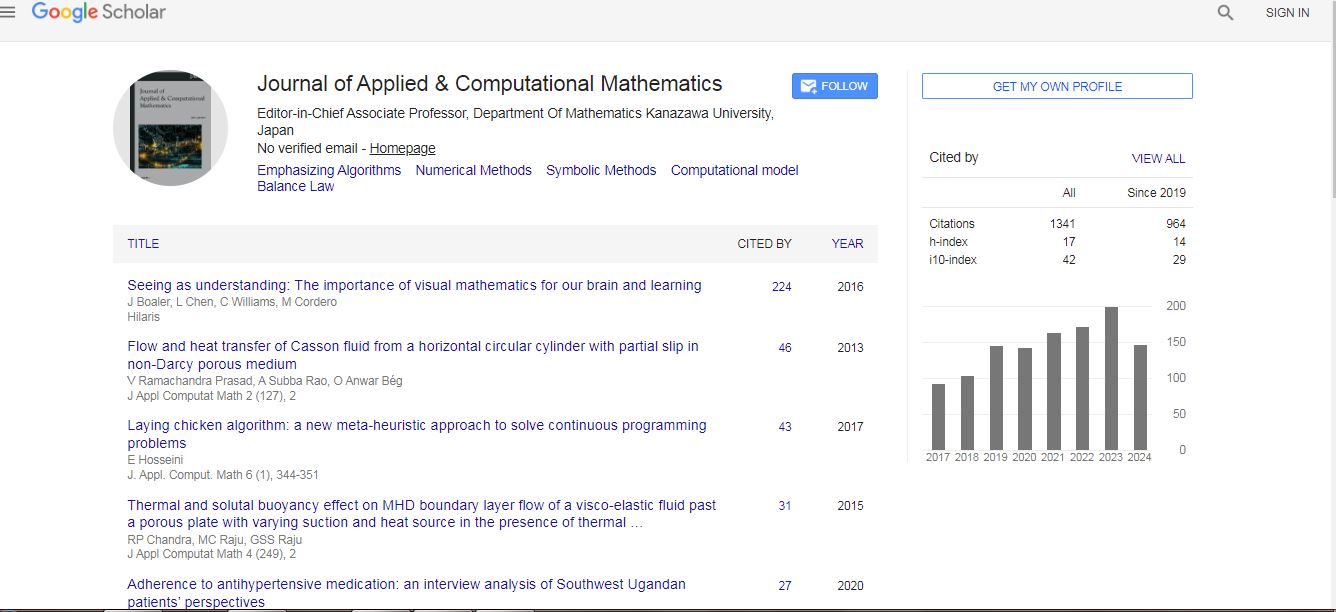
Journal of Applied & Computational Mathematics received 1282 citations as per Google Scholar report