The spread of the utilization of automated gadgets in neuro-recovery treatments requires the accessibility of lightweight, simple to-utilize, savvy and flexible frameworks. RobHand has been planned in view of these objectives. It is a hand exoskeleton particularly reasonable for patients experiencing spasticity in the fingers since it is not difficult to put in the hand and, from an underactuated configuration, permits both flexion and expansion of the fingers. In this work, the primary attributes, the mechanical plan and the turn of events and approval of the kinematic model of the gadget are introduced, which has been all completed considering the proposals of the new IEC 80601-2-78 norm, which formalizes the idea of RACA (Recovery, Evaluation, Remuneration, Easing) robot and addresses parts of productivity and wellbeing, fundamental in this kind of hardware.
HTML PDFShare this article
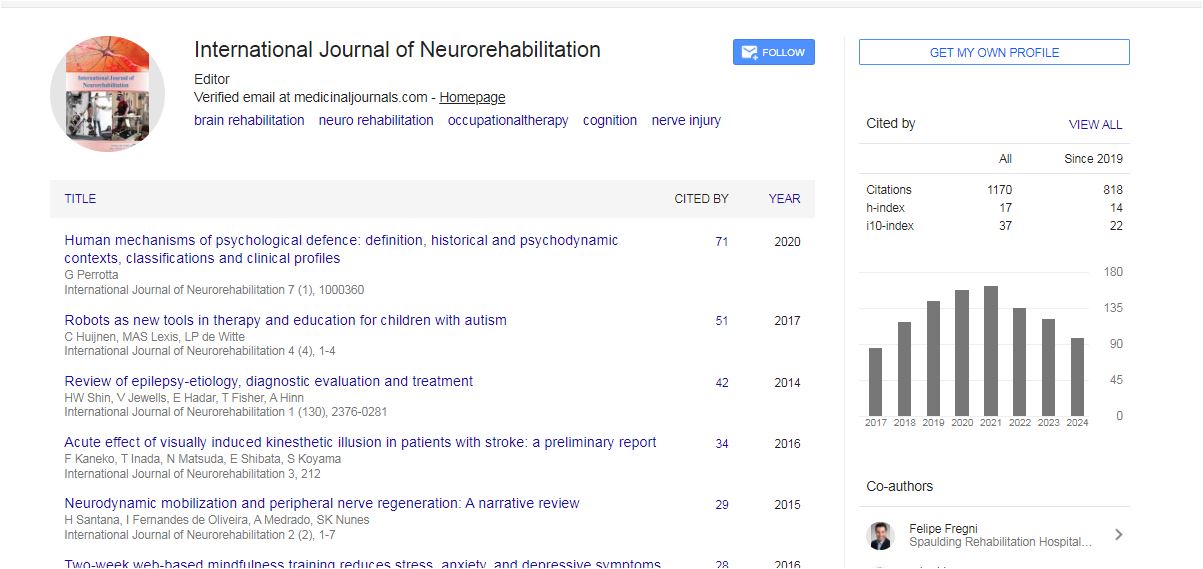
International Journal of Neurorehabilitation received 1078 citations as per Google Scholar report